HomeRobotic Database - Robotic platform | TERRINet


Multi Terrain Flight Arena
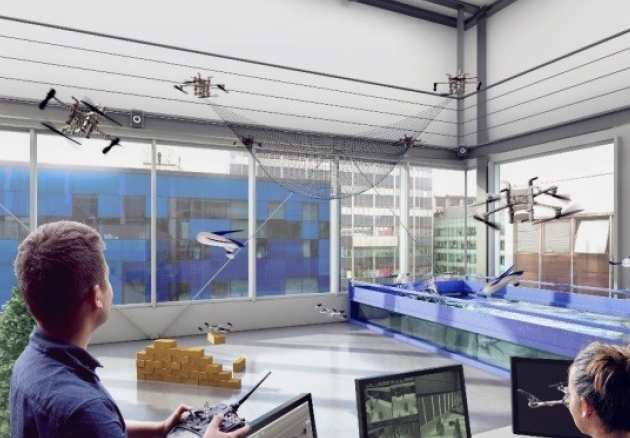
A large enclosed 10x6.2x5.5m flight arena (Arena), equipped with 16 Vicon T40 tracking cameras, capable of tracking multiple flying objects in 6 degrees of freedom, with millimetre accuracy. Tracking data can be used for closed-loop control of vehicles. The Arena is the first of its kind in Europe, enabling engineers to test the next generation of aerial robotics for urban environments and extreme conditions. Researchers in the Arena are able to simulate different terrains in the air, the ocean and on land. The space also enables engineers to create extreme conditions such as fire, smoke and heat to simulate how the next generation of drones will perform in harsh environments. The research focus in Arena encompasses two main themes: (i) physical adaptation; (ii) cybernetics adaptation. The physical adaptation includes morphological changes in different environmental conditions for aerial and multi-terrain robots to land, perch, locomote or \"stay still\" in narrow and cluttered spaces. The cybernetical adaptation includes adjustments at the algorithmic level to maintain the stability, avoid the collisions and the track the safe and reliable trajectories. These activities are considered holistically with potential human interactions, neuroscience, and bio-inspiration.
Key features:
- Millimetre-level accuracy in pose estimate
- Working with multi-robots
- Open-source ROS packages
- A soft ground and surrounded by nets
Possible applications:
- Developing multi-terrain vehicles
- Multi robot applications
- Visual servoing
- Learning for control
- Task and manipulation planning
- Estimation of interaction forces
- Development of innovative control strategies
- Path planning, control and localization
Technical specifications
| Frame rate: | 500 fps |
| Position error: | < 1 mm |
| Multiple tracked objects: | Yes |
| Vehicle availability: | Yes (Some adjustments are needed) |
Access information
| Corresponding infrastructure | Imperial College London The Hamlyn Centre |
| Location | Bessemer Building, Kensington, |
| Unit of access | Working day |
Access history
Butterflies - Test-bed preparation for multi-source indoor hazardous environment to perform simultaneous localization inspired by multi-butterfly paradigm
Chakravarthi Jada
The main objective of this project is to prepare the hazardous Environment test-bed model in the indoor space and collect sensor data-set needed for the implementation of the Butterfly Mating Optimization (BMO) algorithm in 3D coordinate space. The hazardous environment by means includes, setting up of multiple fire and smoke sources (both static and dynamic) in the arena. The data shall be collected and apply the BMO paradigm to colocate the signal sources. This shall provide an opportunity to use multi-quad rotors or any mobile aerial swarm robots to localize the sources in real-time. The results obtained from this project implementation, may give the inspiration to co-locate the nuclear spills that appear suddenly in the nuclear plants, unwanted gas leakage location detection and immediate repairs in the industrial plants and oil spills latitude and longitudinal detection in the ocean and many other direct real-time applications.
We are expecting that after the test-bed preparation and experiments planned, they would have a huge impact on existing simultaneous signal sources identification problems and the methods that are following at present. The test-bed readiness and the simulation results of the BMO paradigm would lead us to the better problem formulation, step-wise procedure in the full-scale real time environment. Most importantly, these experiments will lead us to use aerial vehicles like quad rotors while roaming in the extreme heat, humidity or smog situations and challenges that are involved. At the outset, these experiments can have high impact on the existing un-touched hazardous situations where humans cannot enter such as forest fire-accidents, nuclear plant spills and repair, dynamic oil leakages in the mid-sea, mid-air traffic management etc. These indoor environments and experiments of detection will show a pathway for dealing with all the above and many other extreme scenario scientific problems.
TUNER - Impact absorbing, lightweight metamaterials with tunable stiffness and density for robotics
Ozge Akbulut
Robots, in general, could benefit from components that will improve their survival skills. Impact-absorbing components can potentially increase the durability and safety of robots, and contribute to the cost-effectiveness of robotic systems. In this project, we aim at designing and fabricating a series of porous composite, elastomeric parts that i) could be triggered to decrease their density and ii) change their shape and stiffness with the application of pressure and vacuum.
Soft robotics is at its infancy with a steep growth rate; materials solutions along with smart mechanical design can generate light-weight, impact-resistant, and responsive aerial devices. Flying robots which are projected to be utilized in delivery, infrastructure maintenance and search & rescue need to be able to survive sudden changes in the environment and mitigate unexpected forces during collisions. Imparting shape and density-changing ability to robotic systems would enable reusable, cheaper, and robust off shore applications.
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 730994



Sitemap
Training
Sitemap
Copyright by TERRINet. All rights reserved. – Designed by RGR