HomeRobotic Database - Robotic platform | TERRINet


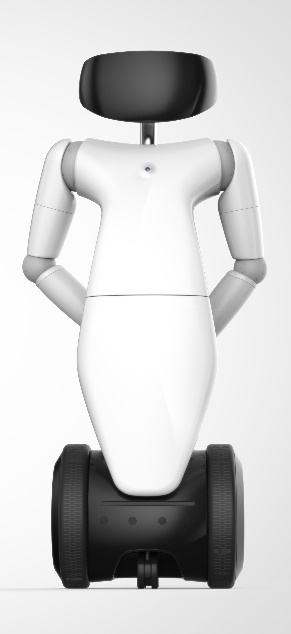
The R1 robot
R1 is a service robot designed at IIT starting from the experience and know-how of the iCub (with which it shares the software API). R1 is 1.3m tall. The torso is equipped with a mechanism that allows varying its height from a minimum of 1.15m to a maximum of 1.45m. R1 has an especially small footprint to move in cluttered office/home/mall environments. R1 is safe for interaction. Arm joints contain a simple torque overload protection, which behaves as a clutch mechanisms providing intrinsic safety. In addition, R1 can be torque controlled (active torque control) via read outs from two 6-axial force-torque sensors and tactile pressure sensors in the hands and forearms. R1 has two eight degree of freedom (DoF) arms. The target payload is 1.5kg in the fully stretched configuration – reaching at 0.7m distance from the robot’s body. The robot has two four-DoF, two degrees of actuation (DOA) hands. The hands are equipped with distributed pressure sensors, joint angle encoders and series elastic actuators to allow monitoring grip forces. The robot has a two-DoF head equipped with sensors and devices for HRI. The robot mounts an Xtion Pro Live RGBD sensor, for depth sensing. Higher performance depth sensors are possible. The head also mounts a Leopard Imaging OV580 twin camera module, which allows for multiple configurable video resolutions and sampling rates. The head also integrates eight microphones, a loudspeaker and a special, custom designed, programmable RGB LED matrix.
Key features:
- Sensors: cameras (2), RGBD camera, microphones (up to 8), joint encoders (28), inertial sensors (linear, angular, compass), capacitive tactile sensors (~1000), 6-axis force/torque sensors (2), lasers (2)
- Footprint: 40cm
- Weight: 51kg
- Payload (hand): 1.5kg
- Degrees of freedom: 28
- Height: 130cm up to 145cm
- Middleware: YARP, ROS
Possible applications:
- Human-Robot Interaction
- Vision – including 3D vision, object recognition, visuo-tactile integration
- SLAM/navigation
- Study mobile manipulation
- Artificial Intelligence
- Service robotics target
Technical specifications
| Hands: | 2 DoF |
| Arms: | 8 DoF |
| Skin sensors: | Capacitive, ~1000 sensing points |
| Max force at the hand: | 1.5kg |
| Cameras: | 640×480 RGB @30fps |
| Weight: | 51kg |
| Power supply: | 48V/onboard battery |
| Interface: | Ethernet/Wi-Fi |
| DoF: | 28 |
| Head: | 2 DoF |
| Torso: | 4 DoF |
| Base: | 2 DoF |
Access information
| Corresponding infrastructure | Instituto Italiano di Tecnologia iCub Facility |
| Location | Via Morego, 30, |
| Unit of access | Working day |
Additional information
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 730994



Sitemap
Training
Sitemap
Copyright by TERRINet. All rights reserved. – Designed by RGR