HomeRobotic Database - Robotic platform | TERRINet
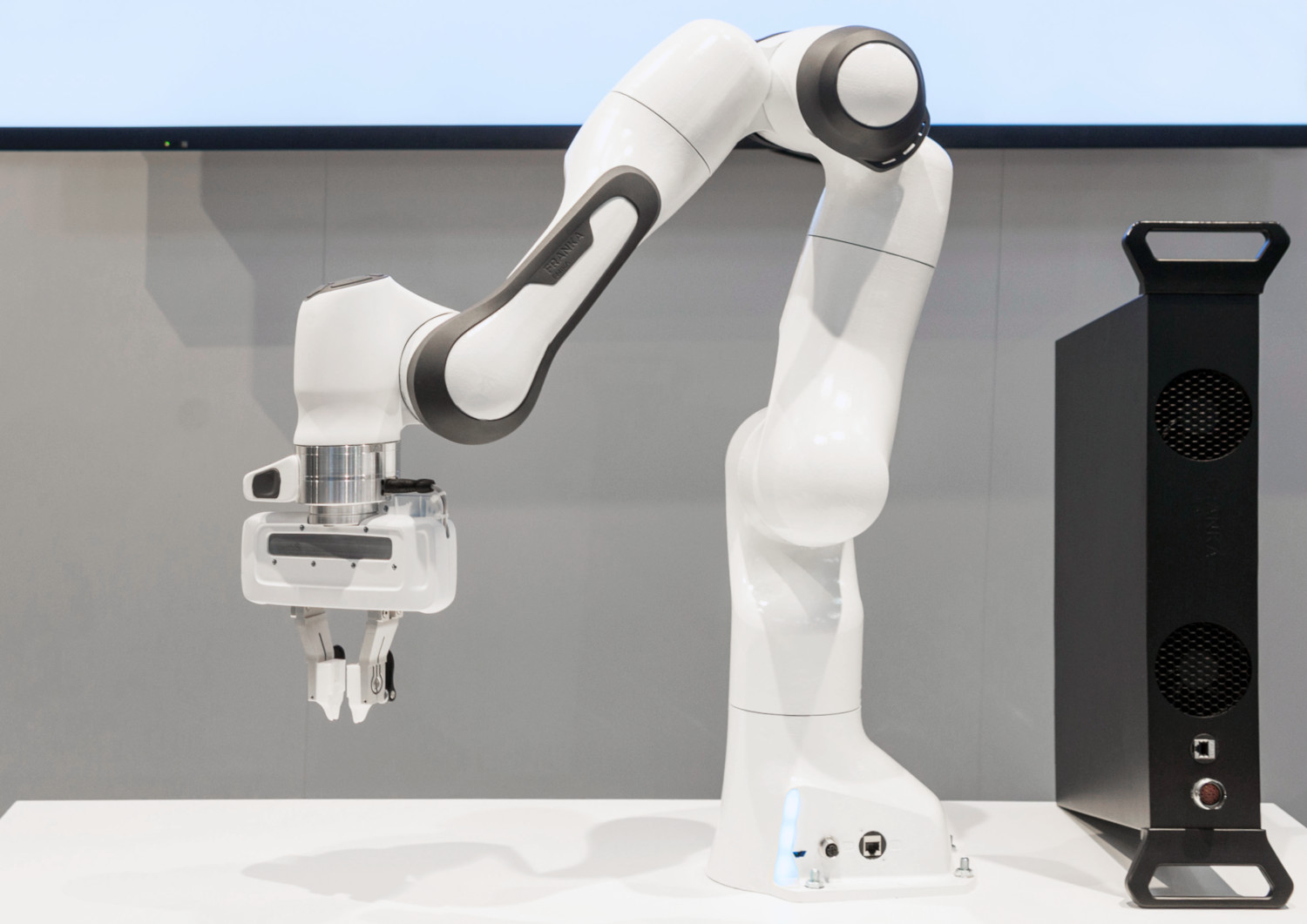
Robotic arms: Franka Emica
At RaM we have multiple general-purpose robotic arms; KUKA LBR4+ arm and Franka Emika Panda arms. Each is a 7-axis fully-actuated robot with torque sensing and control. Each joint is equipped with a position sensor on the input side and position and torque sensors on the output side. The robots can thus be operated with position, velocity and torque control.Unlike typical factory robots, which are so dangerous they are often put inside cages, these arms can operate among people. They are designed to perform tasks that require direct physical contact in a carefully controlled manner. These include drilling, screwing, and buffing, as well as a variety of inspection and assembly tasks that electronics manufacturers in particular have long wanted to automate. The KUKA robot is programmable in C++.The Franka Emika robots are setup with Robotic Operating System (ROS) interface, hence they may be programmed in a variety of languages such as C++, Python, etc.
Key features:
- More modern easy to use control interface, both programmatically as well as GUI based.
- Accurate contact detection, interpretation and reaction;
- Weight of 18kg;
- Workspace range 855mm;Immediate stop in case of collision;
- 3kg load capacity;
- Internal data of the robot and accepts parameters and control values at an update frequency of up to 1 kHz;
Possible applications:
- Learning by demonstration and reinforcement learning of manipulation tasks;
- Implementation of control algorithms for industrial and medical manipulation tasks;
- Development of eye-in-hand visual servoing algorithms;
- Inspection and service robotic applications;
- Medical applications such as control of an ultrasound transducer to follow in-body instruments such as a catheters, endoscopes or biopsy needles.
- Testing teleoperation algorithms;
- Physical human-robot collaboration and interaction tasks;
Technical specifications
| Payload: | 3kg |
| Degrees of freedom: | 7 |
| Sensitivity: | joint torque sensors in all 7 axes |
| Maximum reach: | 855 mm |
Access information
| Corresponding infrastructure | University of Twente Department of Robotics |
| Location | Hallenweg 15, |
| Unit of access | Working day |
Additional information
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 730994



Sitemap
Training
Sitemap
Copyright by TERRINet. All rights reserved. – Designed by RGR