HomeRobotic Database - Robotic platform | TERRINet


ARMAR-4
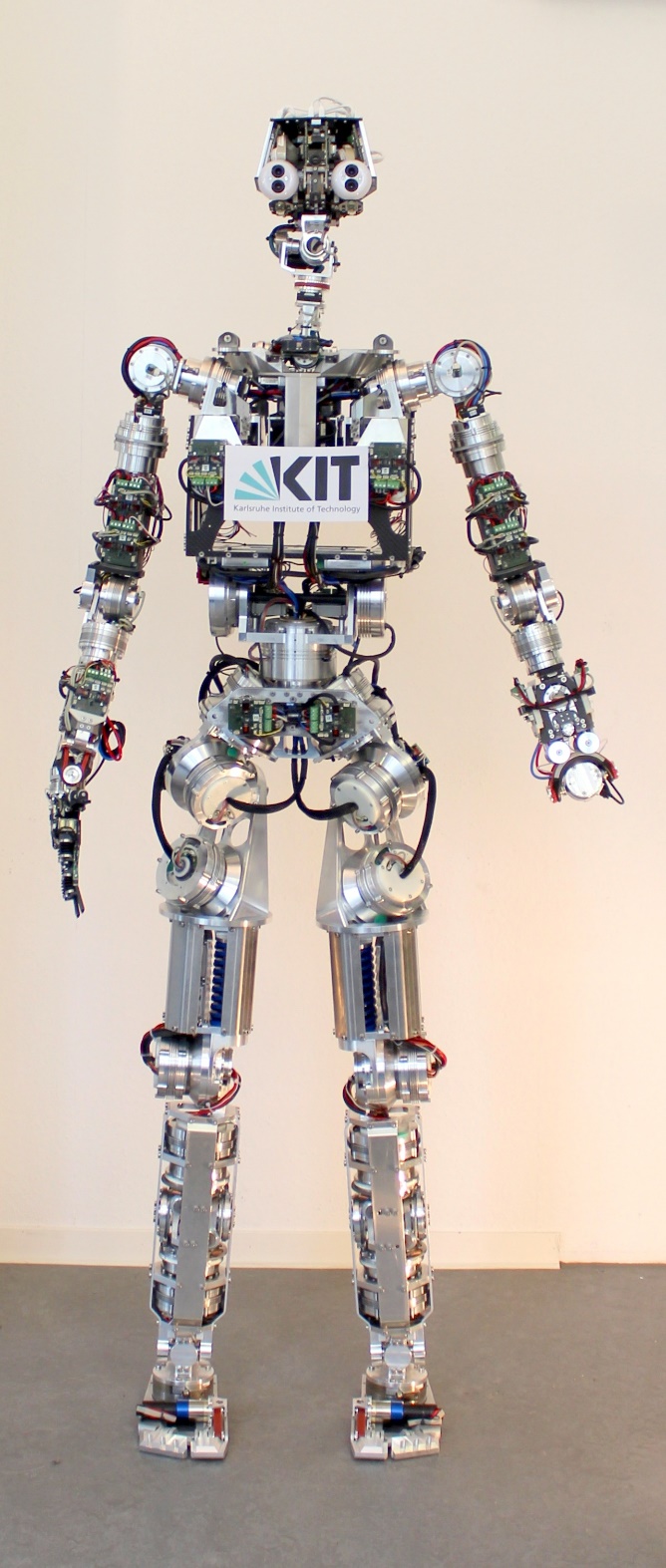
ARMAR-4 is a full-body humanoid robot with torque control capabilities in its arm, leg and torso joints. It has 63 active degrees of freedom with 63 actuators overall, including feet, neck, hands and eyes. It features more than 200 individual sensors for position, temperature and torque measurement, 76 microcontrollers for low-level data processing and 3 on-board PCs for perception, high-level control and real-time functionalities. The robot stands 170 cm tall and weighs 70 kg.Each leg has six degrees of freedom, mimicking the flexibility and range of motion of the human leg. For maximum range of motion and dexterity, each arm has eight degrees of freedom. The kinematic similarity to the human body facilitates the mapping and execution of human motions on the robot.The four end-effectors (hands and feet) are equipped with sensitive 6D Force/Torque sensors to accurately capture physical interaction forces and moments between the robot and its environment. The robot’s two eyes are each equipped with two cameras for wide and narrow angle vision.The three control PCs (two in the torso, one in the head) run Ubuntu 14.04 and control the robot via the ArmarX software framework (https://armarx.humanoids.kit.edu), wherein high-level functionalities like object localization, grasping and planning are already implemented and available.
Key features:
- 9 DoF active head with foveated vision
- 6DoF legs and 8DoF arms
- Position, velocity, current and torque control on joint level
- Bipedal humanoid robot system
- 6D Force/Torque sensors in the wrist and ankle joints
Possible applications:
- Multi-contact whole-body motion planning and execution
- Transfer of human whole-body motion to humanoid motion
- Dynamic whole-body state estimation
- Whole-body balancing
- Whole-body torque control
Technical specifications
| OS: | Ubuntu Linux 14.04 |
| Force-torque sensors: | Four 6D force torque sensors (Two in the wrists and two in the ankle joints) |
| Joint control modes: | Position, velocity, current and torque |
| Color Cameras: | Point Grey Research Dragonfly (RGB, 640×480@30FPS) |
| Motors: | Brushless DC |
| Total Weight: | 70kg |
| Power supply: | 48V DC |
| Robotic Framework: | ArmarX (previous framework MCA) |
| Network: | Gigabit Ethernet |
| Bus system: | CAN-Bus (CANopen) |
| Software: | ArmarX |
Access information
| Corresponding infrastructure | Karlsruhe Institute of Technology Institute of Anthropomatics and Robotics - High Performance Humanoid Technologies Lab (IAR H2T) |
| Location | Adenauerring 2, |
| Unit of access | Working day |
Additional information
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 730994



Sitemap
Training
Sitemap
Copyright by TERRINet. All rights reserved. – Designed by RGR