HomeRobotic Database - Robotic platform | TERRINet


NeuiCub
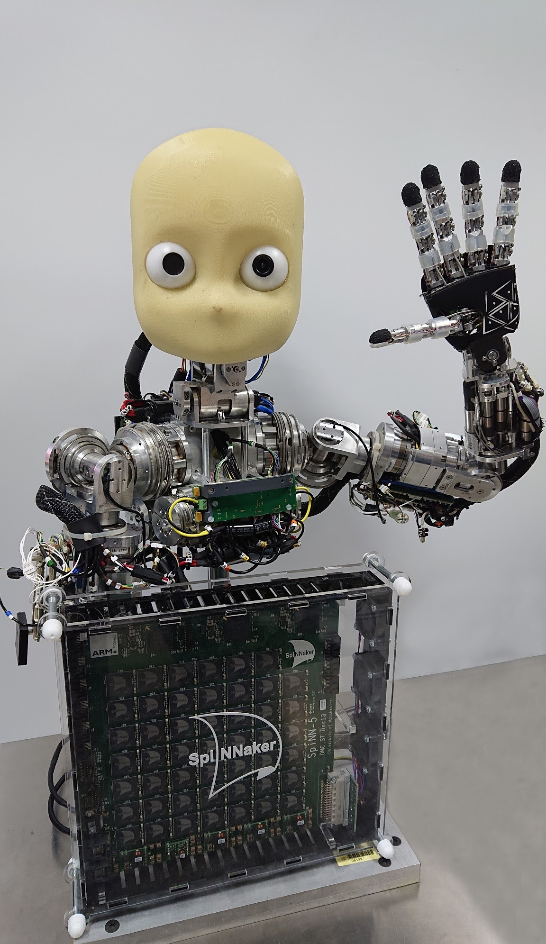
The NeuiCub platform is composed of an iCub robot controlled through a SpiNNaker neuromorphic board (SpiNN-5). It is meant for neurorobotic experiments that involve detailed brain models implemented with spiking neural networks.The SpiNNaker neuromorphic platform comprises arrays of low-power, parallel custom chips (each containing 18 ARM9 cores) running a digital software simulation of neurons and synapses. The SpiNN-5 board includes 48 processors. The system’s philosophy focuses on large brain simulation and spike communication in real time whilst scaling up to biological scale. A standard SpiNNaker neural model is primarily configured through the provision of the “sPyNNaker” implementation of the Python-based PyNN modeling framework.The version of the iCub humanoid robot available at the BioRobotics Institute is provided with one head that has 6 degrees of freedom (dofs), 3 for eyes and 3 for neck control), two arms (7 dofs each) and one hand (3 dofs for the thumb, 2 for the index, 2 for the middle finger, 1 for the coupled ring and little finger, 1 for the adduction/abduction). The iCub robot available at the BioRobotics Insitute is equipped also with an inertial sensor, two dragonfly cameras and tactile sensors in the hand.
Key features:
- Touch sensors embedded in the iCub hand
- Closed-loop mechanisms (data exchange and synchronization) between SpiNNaker board and iCub robot already implemented
- Simulating up to 200K neurons in the SpiNNaker board
- YARP interface and iCub control modules available
- Stereo vision and inertial sensor
Possible applications:
- Grasping, Manipulation
- Testing of neuroscienfic models (brain-based controllers)
- Neuromorphic Control
- Gaze control
- Gaze guided manipulation
Technical specifications
| Power supply: | 12V@5A peak for SpiNNaker board |
| Interface: | 2xEthernet |
| DoFs: | 9 for the hand |
| Camera resolution: | 640×480 |
Access information
| Corresponding infrastructure | School of Advanced Studies Sant'Anna The BioRobotics Institute |
| Location | Viale Rinaldo Piaggio, 34 |
| Unit of access | Working day |
Additional information
SpiNNaker webpage:http://apt.cs.manchester.ac.uk/projects/SpiNNaker/
SpiNNaker API documentation: http://spinnakermanchester.github.io/
iCub user manual: http://wiki.icub.org/wiki/Manual
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 730994



Sitemap
Training
Sitemap
Copyright by TERRINet. All rights reserved. – Designed by RGR