HomeRobotic Database - Robotic platform | TERRINet


I-Support soft arm
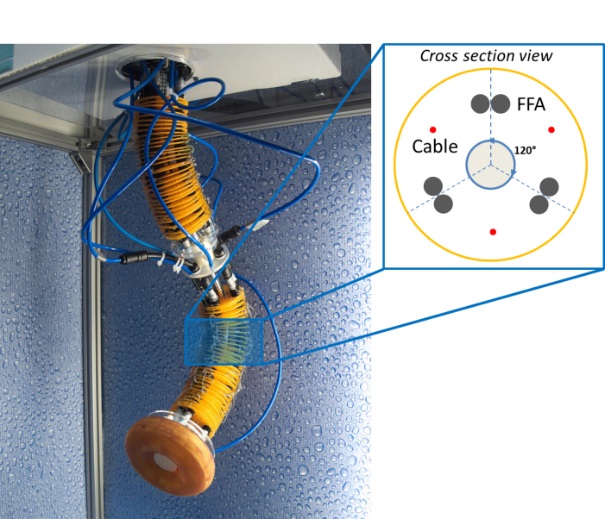
The I-Support platform consists of a manipulator made of two identical interconnected modules. Each module, 60 mm in diameter and 200 mm in length, counts on: 3 couples of McKibben-based bellow-like flexible fluidic actuators (FFA) arranged at 60° with respect to 3 cables, an internal channel designed for the provision of water/soap but that can be exploited for passing some possible tools up to the tip and a layered structure along the module to drive the activation energy towards the right direction. Each module has elongation, contraction, omnidirectional bending, and variable stiffness capability. Furthermore, the manipulator being modular and implementing bowden-cable technology has multiple advantages, as follows: (i) fast replacement, (ii) the possibility of using one/two modules, (iii) local control of the single segment and (iv) an easy design for sensors integration.The manipulator has been designed for assisting elderly people during the showering task, but it can be used as a multipurpose platform for implementing and testing control algorithms for soft manipulators.
Key features:
- Multipurpose platform
- Safe interaction with body parts or delicate objects
- Contraction, elongation, omnidirectional bending, stiffness modulation
- Modular
Possible applications:
- Human-robot interaction (e.g. feeding)
- Soft robotic platform for control algorithms testing
- *The end-effector design can be adapted to host a compatible gripper for pick and place or sorting tasks
- Pick and place tasks with delicate objects*
- Collaborative robot (e.g. sorting)*
Technical specifications
| Time response (servo motors – no load): | 1.4sec/360° |
| (pneumatic valves): | 0.03 sec |
| Modules can be quickly connected/disconnected for a one/two modules manipulator.: | |
| Stall Torque (6.0V): | 13.2 kg.cm |
| Interface: | USB |
| DoF: | Infinite passive – 12 active (actuators) |
| Stiffness variation (single module): | 0.3 N/cm – 7.2 N/cm |
| Power supply: | 220 V@ 50 Hz |
| Weight (manipulator only): | 200 g |
Access information
| Corresponding infrastructure | School of Advanced Studies Sant'Anna The BioRobotics Institute |
| Location | Viale Rinaldo Piaggio, 34 |
| Unit of access | Working day |
Additional information
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 730994



Sitemap
Training
Sitemap
Copyright by TERRINet. All rights reserved. – Designed by RGR