HomeRobotic Database - Robotic platform | TERRINet


Magnetic Micro Manipulation Platform
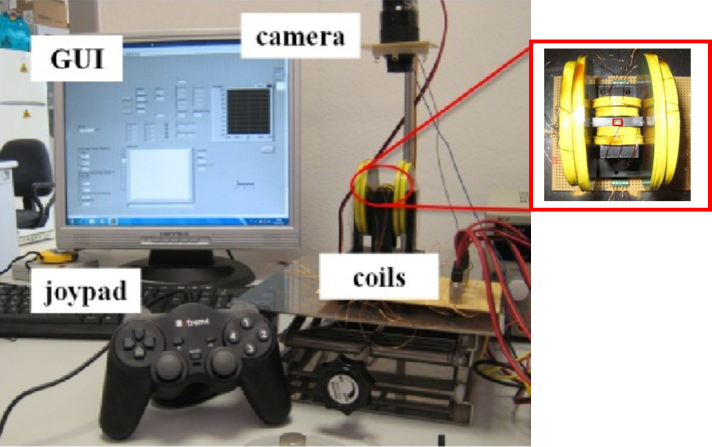
The Magnetic Micro Manipulation Platform consists of a magnetic field generator and a control system. The magnetic field generator is composed by two orthogonal pairs of Helmholtz coils, which generate a uniform field, and two orthogonal pairs of Maxwell coils, which generate a uniform field gradient. The 2D workspace is 2 mm x 3.5 mm. The maximum magnetic field and gradient are 12 mT and 1.2 T/m, respectively, generated by currents in the range 0-2 A. The control system comprises a laptop, a joypad (SAITEK P580 Blue Rumble Pad), a camera (BASLER scA1390-17gc), a data acquisition board (NI DAQ USB-6259) and custom electronicsA custom electronics is avaiable and it is based on a closed loop op-amp configuration with a Darlington stage. The driving signals for the electronics are generated through the DAQ board by means of a software program developed in LabVIEW (National Instruments, Inc., USA). The magnetic fields and gradients are controlled by the user through the joypad interface. The GUI (graphical user interface) can be adapted in order to full-fill specific testing needs. At the same time, the camera for the 2D visualization of the workspace can be adapted depending on the type of microrobot which is under testing.
Key features:
- Uniform magnetic field
- Low currents for high magnetic fields
- Independent control of magnetic fields and gradients
- Intuitive, customized and user-friendly control and interface
- Uniform magnetic field gradient
- Workspace: 2 mm x 3.5 mm
Possible applications:
- Generation of a uniform magnetic field gradient along 2 axis
- Generation of a uniform magnetic field along 2 axis
- Magnetic characterization of magnetic micro-objects
- 2D manipulation of magnetic micro-objects
- Magnetization of ferromagnetic microobjects
Technical specifications
| Maximum magnetic field: | 12 mT |
| Workspace: | 2 mm x 3.5 mm |
| Control: | 2D |
| Maximum magnetic field gradient: | 1.2 T/m |
Access information
| Corresponding infrastructure | School of Advanced Studies Sant'Anna The BioRobotics Institute |
| Location | Viale Rinaldo Piaggio, 34 |
| Unit of access | Working day |
Additional information
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 730994



Sitemap
Training
Sitemap
Copyright by TERRINet. All rights reserved. – Designed by RGR