HomeRobotic Database - Robotic platform | TERRINet


Da Vinci Research Kit (DVRK)
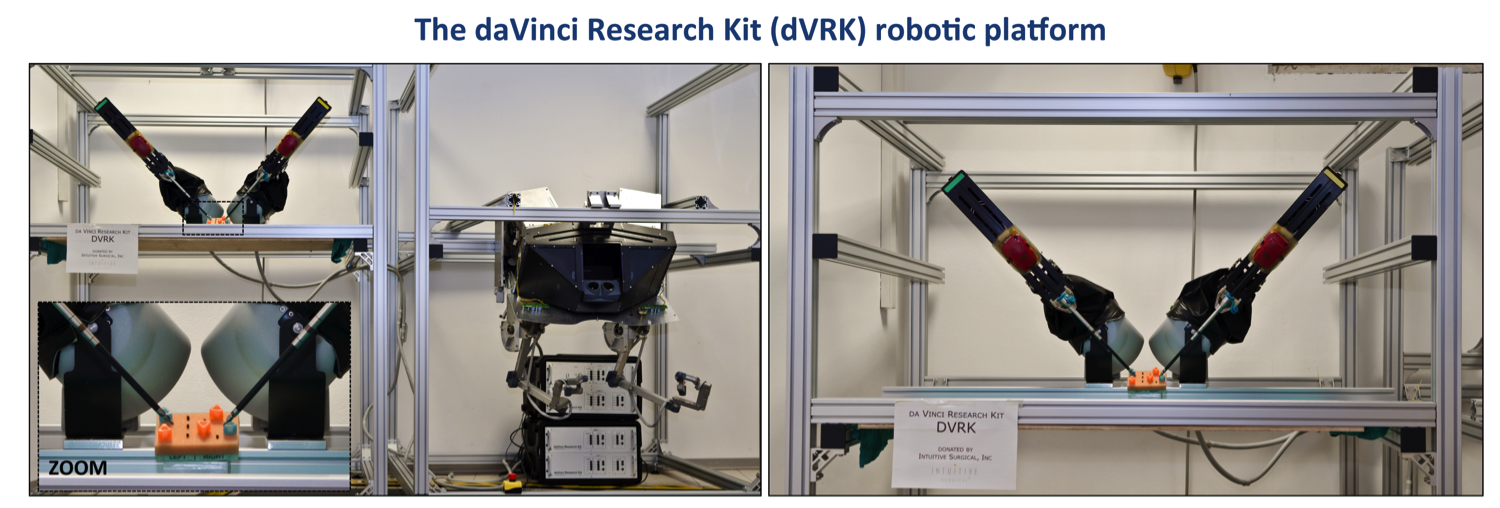
The da Vinci Research Kit (dVRK) is a research platform based on the da Vinci Surgical System developed and distributed by Intuitive Surgical Inc. The kit is a collection of first-generation da Vinci components that can be used to assemble a telerobotics platform which provides complete access to all levels of control via open source electronics and software. The platform consists of a surgeon’s console to tele-operate the surgery and a patient side system where the surgery takes place. The surgeon’s console consists of two Master Tool Manipulators, each having 8 DOF for dexterous and natural hand manipulation, and a foot-pedal tray. On the other side at the patient’s end, there are two Patient Side Manipulators, which are controlled by the two Master Tool Manipulators. The interface between the two components is based on custom hardware consisting of motor-controllers, coupled with FPGAs and connected to a PC running the control loops.The DVRK can be exploited for interfacing with different master manipulators, for testing force-feedback strategies, of for the integration on novel tools for surgery.
Key features:
- External viewer
- Open access to all level of control
- Console + two robotic arms (8DOF)
- Teleoperation robot
- RS-232 (over USB) and Bluetooth communication
Possible applications:
- Better estimation of interaction forces during surgical procedures (e.g. integration of haptic feedbacks)
- Development of innovative control strategies (e.g. new algorithms for dynamic parameters identification)
- Development of innovative robotic tools (e.g. Surgical Manipulation, Surgical Interventions/Tasks, Haptics)
Technical specifications
| Control: | Open source platform |
| DoF: | 16 (slave arms) |
| Software: | ROS |
Access information
| Corresponding infrastructure | School of Advanced Studies Sant'Anna The BioRobotics Institute |
| Location | Viale Rinaldo Piaggio, 34 |
| Unit of access | Working day |
Access history
ROSMA - Robotics surgical maneuvers data acquisition
Irene Rivas Blanco
The global objective of this proposal is to build a large dataset of robotic surgical maneuvers using the da Vinci Research Kit (dVRK) platform. One of the trending research topics in the field of surgical robotics is the design of collaborative strategies so that robots can aid surgeons performing certain actions with autonomy. Automating parts of a surgery has many advantages such as increased precision and accuracy, consistency in treatments, and greater dexterity and access to tissues. However, the adoption of autonomy in the surgical domain is still in an early stage. Thus, the dataset built during this project would be helpful to research on the field of autonomous robotic surgery. In particular, it will be used to advance in the topic of collaborative surgical robots, exploring the use of Deep Learning techniques to perform autonomous auxiliary tasks in laparoscopic procedures.
The da Vinci surgical robot is the main reference in the field of surgical robotics, thus most researches addressing advances in this field use the research version of this platform, the dVRK, to perform their experiments. Building a database of robotic surgical maneuvers using this platform will give the user the possibility of performing several investigations derived from the data analysis, ranging from maneuvers segmentation to autonomous task planning.
Moreover, the Department to which the applicant belongs, has recently acquired a high-performance computer for applications in the field of cognitive robotics. Thus, the surgical robotics database will also be accessible for members of this department in order to explore Deep Learning techniques for tasks and/or objects recognition and other applications that may be of the interest of the department’s members. In addition, it is expected to use this database to carry out several end-of-degree projects with engineering students.
Additional information
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 730994



Sitemap
Training
Sitemap
Copyright by TERRINet. All rights reserved. – Designed by RGR