HomeRobotic Database - Robotic platform | TERRINet

Oncilla
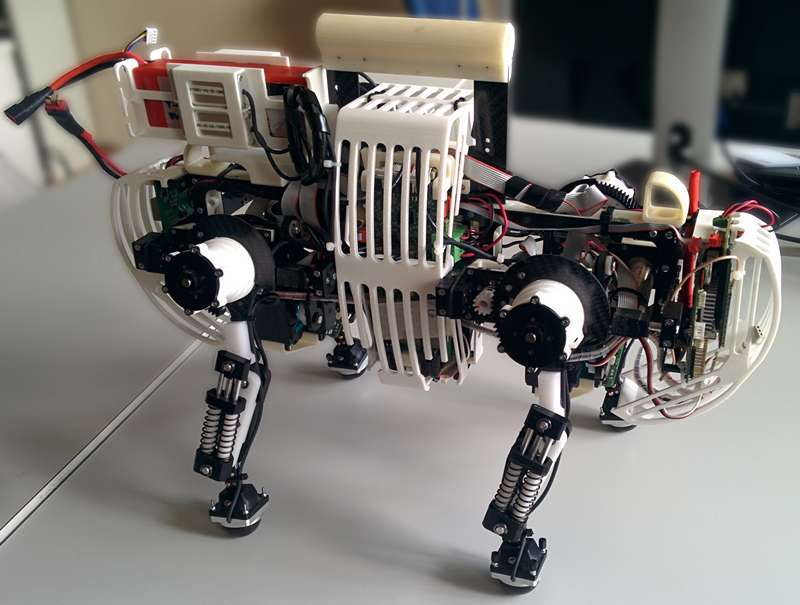
Oncilla is a compliant, quadruped robot developed during the FP7 European project AMARSi (Adaptive Modular Architectures for Rich Motor Skills, project start March 2010, project duration 48 months, 4 Oncilla copies build and distributed, 2 remain at BIOROB). The goal of the AMARSi project was to improve richness of robotic motor skills. Oncilla is a highly sensorized robot with panthographic legs (ASLP legs) as well as an abduction/adduction (AA) mechanism. The sensorization features encoders on each joint and motor, IMU as well as new ground contact sensors in the feet (3d force-sensors). The research done with the BIOROB team focuses around closed loop rough terrain locomotion and richer motor behaviors through a combination of CPG’s and reflexes.
Key features:
- Load sensors, IMU
- On-board power supply
- Closed-loop control with joint position and inverse kinematics
- Different actuator architecture using Brushlessh DC motors and custom electronics
- Possibility of up to 500g payload
Possible applications:
- Exploring different neural networks inspired by animals
- Platform for sensor carrier, such as camera
- Animal gait exploration
- Researching different feet or legs designs
- Search and Rescue
Technical specifications
| dhip-shoulder: | 0.223m |
| dshoulder-shoulder: | 0.138m |
| lhip, standing height: | 0.201m |
| Mactuators+electr, sum: | 2.845 kg |
| Mrobot: | 5.05 kg |
| Active degrees of freedom: | 12 |
| Gait type: | trot/ bound/ walk |
| Body lengths per second: | 2.7 |
| Froude number FR (v^2/G/lhip): | 0.18 |
| Maximum speed, vmax: | 0.6 m/s |
| RC servo motor: | Kondo KRS2350 ICS (4x), Maxon 90 BLDC (8x) |
| Control board: | RoBoard RB110 |
| Power supply, tethered: | 10V to 12V |
Access information
| Corresponding infrastructure | École Polytechnique Fédérale de Lausanne BioRobotics Lab |
| Location | Route Cantonale, |
| Unit of access | Working day |
Additional information
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 730994



Sitemap
Training
Sitemap
Copyright by TERRINet. All rights reserved. – Designed by RGR