HomeRobotic Database - Robotic platform | TERRINet


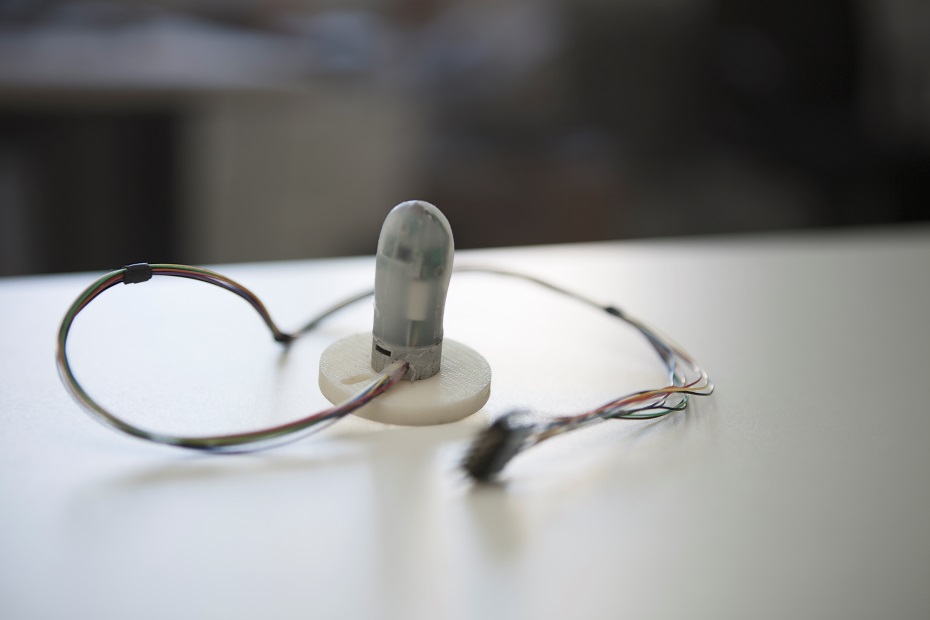
Neuromorphic Artificial Touch Sensors
Neuromorphic Artificial Touch Sensors are a platform composed by an artificial tactile finger equipped with an array of 4 tactile MEMS sensors (MicroTAF), each having 4 output channels, and single board RIO by National Instruments. It encodes not only the normal force but also tangential forces. Data generated from the fingertip can be raw, i.e., the conversion of MEMS outputs, or neuromorphic, i.e., with sequences of neural-like spikes.The artificial tactile finger is available in two versions, one with a thick covering layer emulating the firing behaviour of type II human mechanoreceptors (Ruffini and Pacini), and another with a thin covering layer emulating the firing behaviour of type I mechanoreceptors (Merkel and Meissner).The platform is capable to discriminate between surfaces with different roughness, even between different daily use surfaces (like glass, wood, paper and more).The artificial tactile finger can be mounted on the Azzurra Hand with a proper adapter or any other hand/arm with a simple mechanical interface.
Key features:
- Human size finger
- Variable acquisition frequency (only for raw data)
- USB, Ethernet or Wi-Fi communication (depending on the sbRIO used)
- Raw output, neuromorphic output or both
- Light and robust
Possible applications:
- Neuromorphic encoding of tactile interaction
- Neuroscience and Prosthetics
- Human-Robot Interaction
- Remote tactile sensing
Technical specifications
| Number of channels: | 16 |
| Maximum measurable force: | Up to 5N |
| Interface: | Ethernet, USB, Wi-Fi |
| Power supply (finger): | 5V battery package |
| Power supply (sbRIO): | 9V@2A (max) |
Access information
| Corresponding infrastructure | School of Advanced Studies Sant'Anna The BioRobotics Institute |
| Location | Viale Rinaldo Piaggio, 34 |
| Unit of access | Working day |
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 730994



Sitemap
Training
Sitemap
Copyright by TERRINet. All rights reserved. – Designed by RGR